成果展示
Intelligent Sliding Mode Tracking Control for Electro hydraulic Position Servo Systems Based on Variable Exponential Power Reaching Law with CGWO-PSO
时间:2023-12-18作者:编辑:审核:阅读:296
来源:能源与动力学院,肖玲斐、刘威
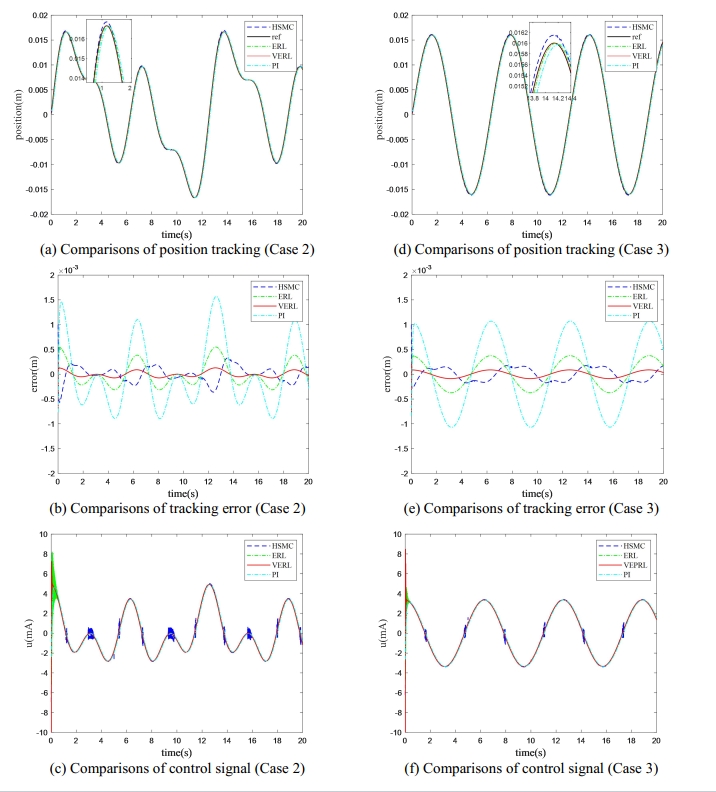
研究了一种针对电液伺服位置系统变指数趋近率的滑模跟踪控制方法,该方法不仅提高了到达滑模表面的速度,而且尽可能地保证了滑模表面的平滑逼近性能,有效地减少了滑模表面的抖振现象。为了优化滑模控制器的参数,将灰狼优化算法与粒子群优化算法(CGWO-PSO)巧妙地结合起来,提出了一种新的滑模控制器优化算法。新的CGWO-PSO优化算法具有更快的收敛速度和更高的性能。

Xiao Lingfei, Liu Wei, Zhu Xiaoqian, Tan Yushuo. Intelligent Sliding Mode Tracking Control for Electro hydraulic Position Servo Systems Based on Variable Exponential Power Reaching Law with CGWO-PSO.IJCAS,2023(accept)
